后端
定位
智能合约
自然语言处理
化学信息学
程序中断
nosql
脑电
孤立点
遥感数据处理
flume
协变,回避虚函数,特殊虚函数
损失函数
分布式存储技术
期末网页作业
上位机
AQS
可视化
逻辑运算符
实用技巧
外设硬件
2024/4/13 20:15:17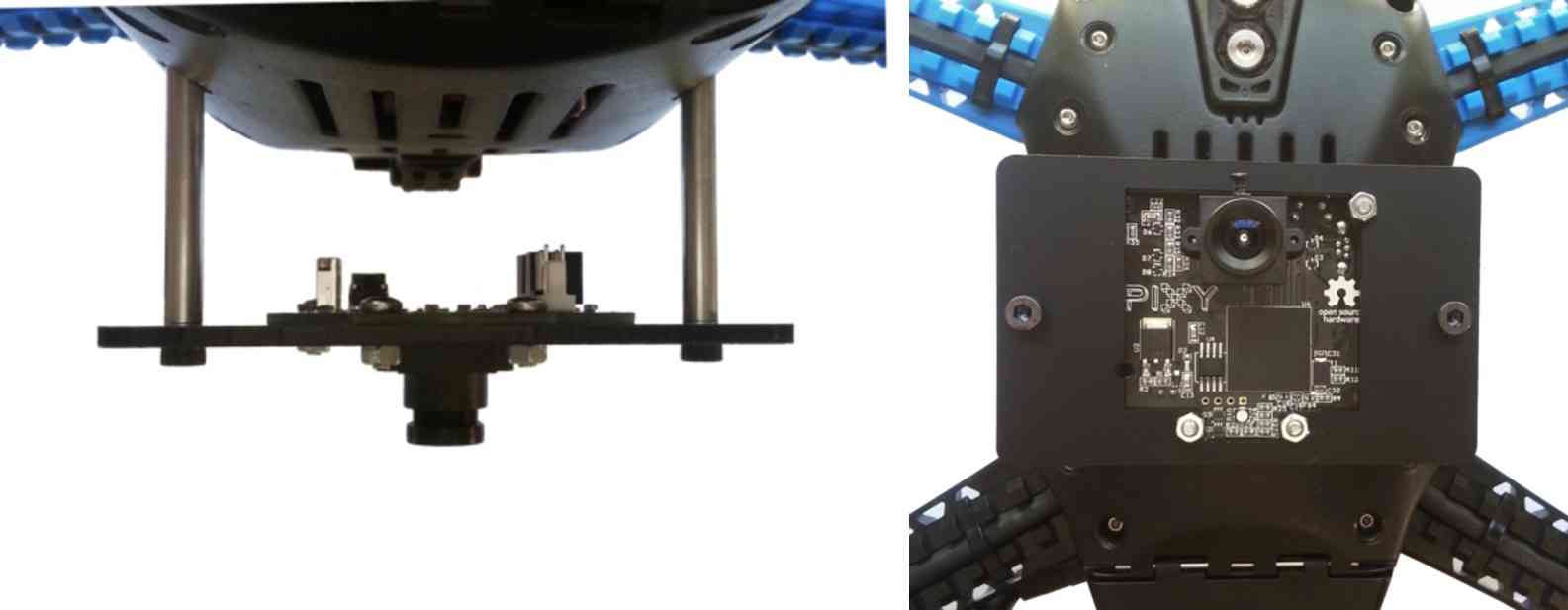
(30)精准降落和悬停(IRLock)
文章目录 30.1 概述
30.2 哪里可以买到
30.3 连接到自动驾驶仪
30.4 安装到框架上
30.5 通过任务规划器进行设置
30.6 飞行和测试 30.1 概述
Copter 支持使用 IR-LOCK 传感器(IR-LOCK sensor)和声纳或激光雷达(sonar or lidar)进行精确着陆。使用该系统,当飞行…
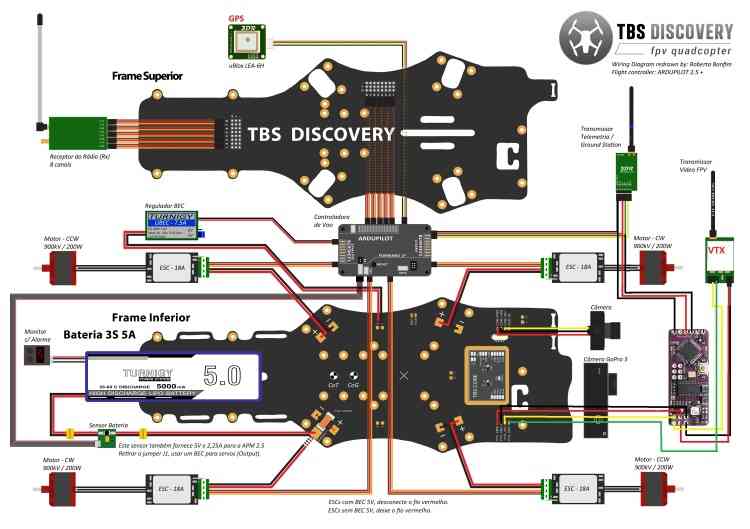
(15)第一人称视角视频
文章目录 前言
15.1 推荐的零件
15.2 连接图示
15.3 通过任务计划器最小化OSD设置
15.4 集成式OSD
15.5 用户视频/博客
15.6 与FPV飞行特别相关的安全警告
15.7 政府/地方法规 前言
第一人称视角在飞行时为你提供了真正的飞行员视角,它将视频摄像机和发射器…
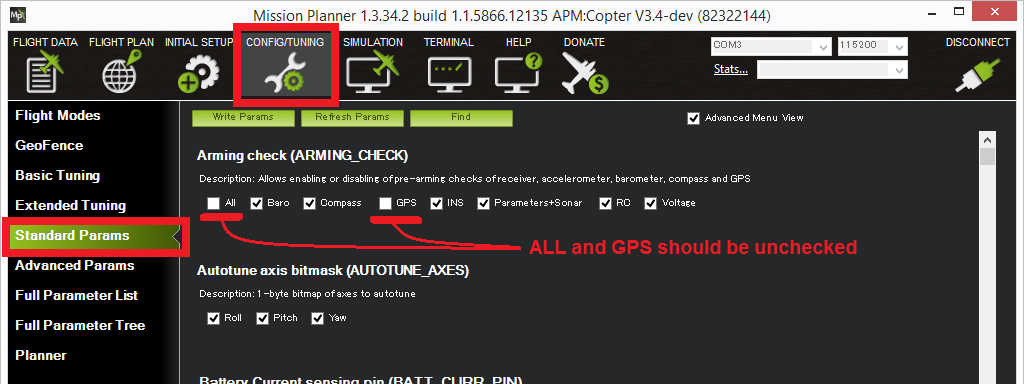
(25)(25.1) 光学流量传感器的测试和设置
文章目录
25.1.1 测试传感器
25.1.2 校准传感器
25.1.3 测距传感器检查
25.1.4 预解锁检查
25.1.5 首次飞行
25.1.6 第二次飞行
25.1.7 正常操作设置
25.1.8 视频示例(Copter-3.4)
25.1.9 空中校准 25.1.1 测试传感器
将传感器连接至自动驾驶仪…

(6)蜂鸣器(又称音调报警)
文章目录
6.1 使用有源蜂鸣器而不是无源蜂鸣器
6.2 安装蜂鸣器
6.3 使蜂鸣器安静 蜂鸣器(或音调报警器)可用于以声音指示飞行器的状态变化。根据电路板的能力,它可以是一个有源设备(只需要施加电压来产生一个单一频率的音调&am…

(32)测距仪(声纳、激光雷达、深度摄影机)
文章目录
前言
32.1 单向测距仪
32.2 全向性近距离测距仪
32.3 基于视觉的传感器 前言
旋翼飞机/固定翼/无人车支持多种不同的测距仪,包括激光雷达(使用激光或红外线光束进行距离测量)、360 度激光雷达(可探测多个方向的障碍…
(16)燃油流量和液位传感器
文章目录 前言
16.1 燃油流量传感器
16.1.1 连接到自动驾驶仪
16.2 燃油液位传感器
16.2.1 PWM油位传感器
16.2.2 模拟油位传感器 前言
在 4.0 及以后的固件版本中,ArduPilot 提供了使用燃油流量和液位传感器的能力,此外还有电池监控器。支持脉冲输…